全国百强科技期刊
2025年5月27日
研发高灵敏度触觉反馈系统,使机器人不仅能灵活抓取物体,还能像人类一样感知丝绸的顺滑、砂纸的粗糙,甚至区分不同面料的纹理差异,是未来机器人的研发方向之一。近日,南京工业大学黄维院士、孙庚志教授,安徽工程大学郑贤宏博士,联合南开大学、复旦大学、金陵科技学院等单位众多合作者,研发出一种仿生纺织触觉传感器及系统,首次在单一器件中实现静态力与动态振动的高精度同步感知,推动机器人触觉迈入“新纪元”。
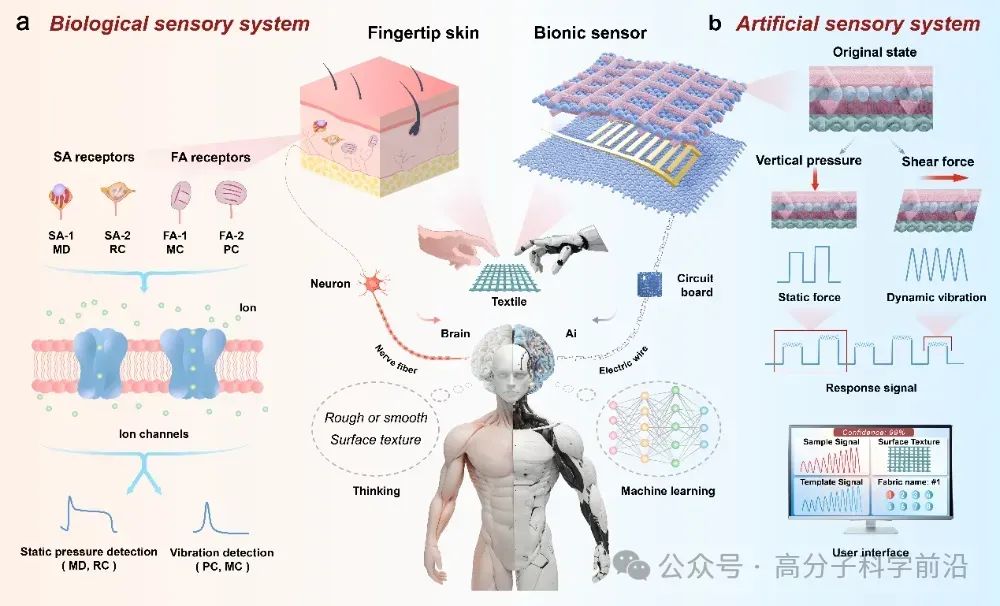
图1. 仿生触觉感知系统的设计理念
研究亮点:三维蜂窝织物,破解触觉难题
传统触觉传感器需多层电路分别模拟“静态压力”和“动态振动”感知,导致设备笨重、信号易干扰。而这项研究创新设计三维蜂窝状纺织结构,灵感源自人类指尖的机械感受器:
高灵敏度:静态压力灵敏度达2486.9 kPa-1,响应速度10 ms,比人类皮肤(30-50 ms)更快。
双模感知:单器件同步捕捉静态力和高频振动,精准还原触觉细节。
超强耐用:2.4万次压力循环测试后性能无衰减,轻松应对高强度使用场景。
技术突破:AI赋能,秒速识别纹理
团队将传感器与机器学习算法结合,打造全自动纹理识别系统:
精准分类:对21种面料的识别精度超98.9%,最高达100%。
极速响应:支持50-300 mm/s的扫描速度,远超同类技术。
自适应场景:即使在曲面、海绵等复杂表面,识别精度仍保持95%以上,展现强大鲁棒性。
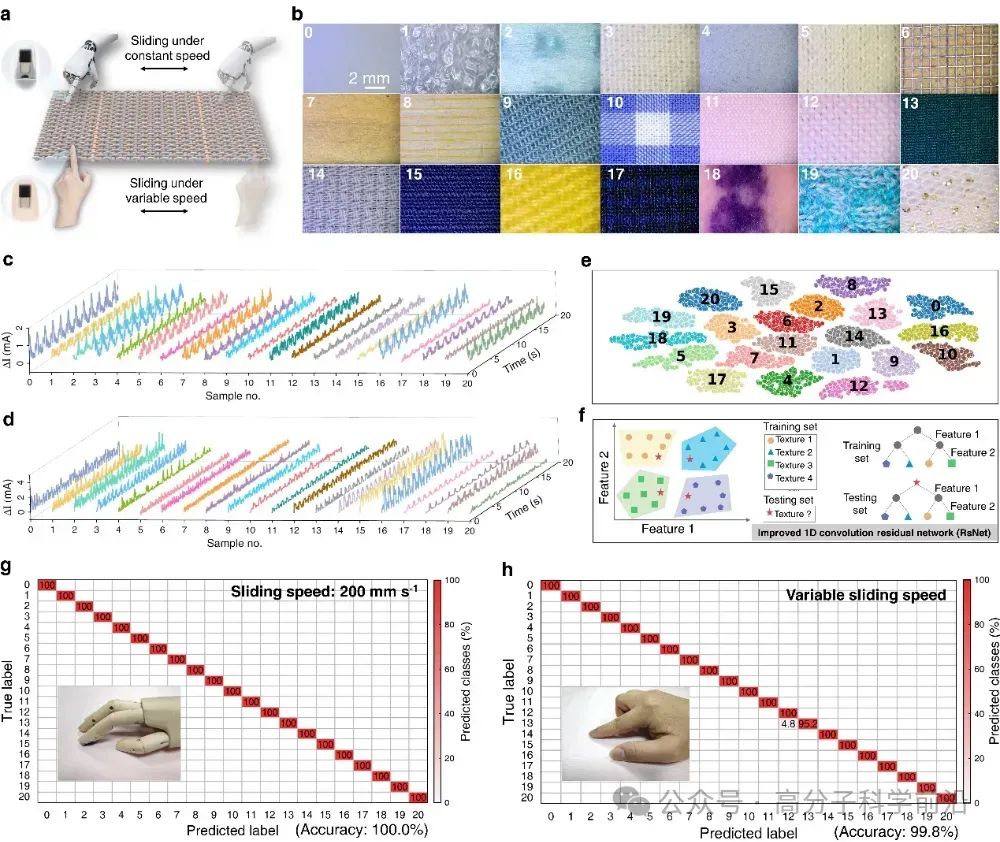
图2. 基于触觉传感器和机器学习进行表面纹理感知
应用前景:从假肢到工业机器人
智能假肢:赋予截肢者真实的触觉反馈,抓握物体时感知力度与材质,提升生活品质。
人形机器人:助力家庭服务、医疗护理机器人更安全地操作易碎物品,如区分玻璃杯与塑料杯。
工业质检:快速检测纺织品瑕疵,或用于汽车制造中精密零件的表面质量评估。
虚拟现实:结合触觉手套,让VR交互更具沉浸感。
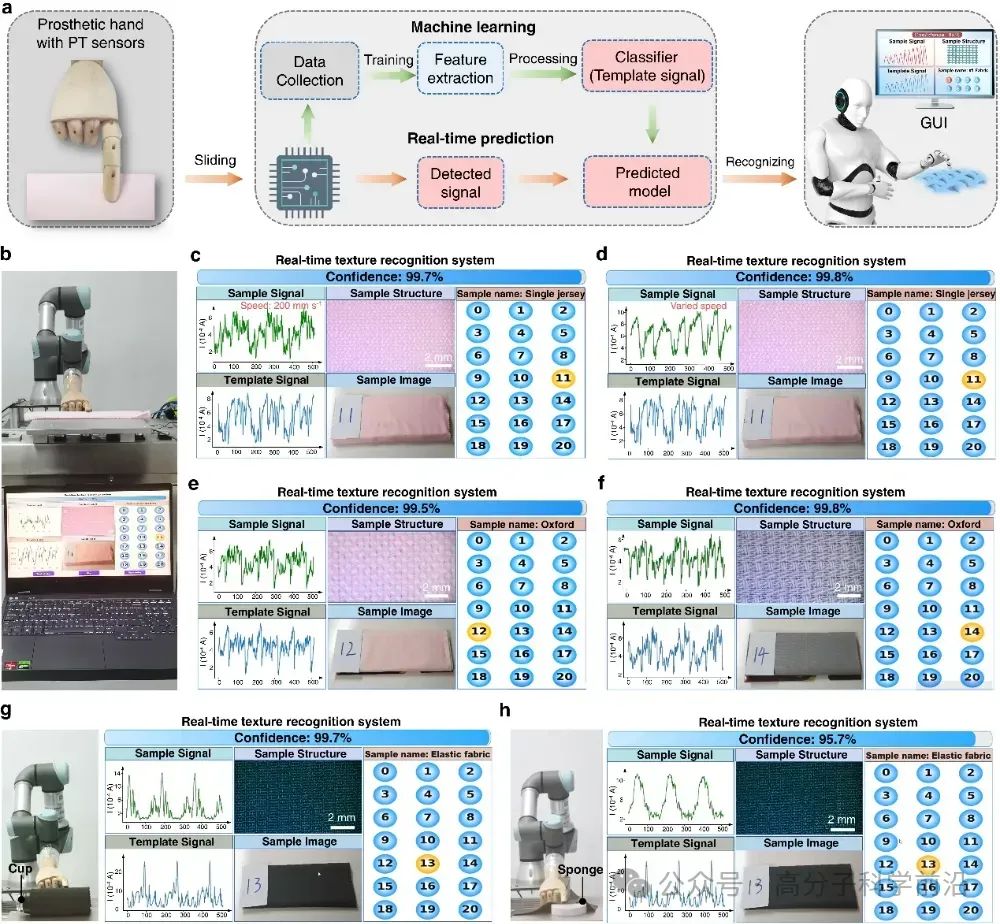
图3. 实时表面纹理识别系统的设计与验证
相关成果以“A Bionic Textile Sensory System for Humanoid Robots Capable of Intelligent Texture Recognition”为题在发表在Advanced Materials。
原文链接:https://doi.org/10.1002/adma.202417729
(来源:高分子科学前沿)
※ 有关作品版权事宜请联系:010-84463638转8850 电子邮箱:info#texleader.com.cn
纺织导报官方微信



© 2026 《纺织导报》 版权所有
京ICP备10009259号-3
 京公网安备 11010502045125号
京公网安备 11010502045125号


