全国百强科技期刊
2024年11月20日
能够为穿戴者提供机械力的动力服,是软体机器人学家长期以来的目标。目前,已有研究学者验证了基于电机和鲍登线(类似自行车刹车线)的动力服能够降低功耗,但这些设计安装后比较僵硬。而记忆合金 、气动执行器和介电弹性体等软体致动器原则上可以实现完全柔顺贴身的执行器。实现该目标的主要挑战在于开发软体致动器的机械性能(软体柔顺)、几何构造(织物或纱线状便于集成在服装中)以及驱动性能(接近人体肌肉所需的力、应变、速度和能量效率)。
类似布料的致动器有望集成在日常服装中,在穿戴简便性以及社交接受度上都优于刚体外骨骼。
2022年,韩国科学技术院Il-Kwon Oh教授等通过扭结的方式构造了记忆合金导线实现的布料致动器,克服了以往针织面料在这过程中的诸多问题,例如产力效率低、电热不均匀、结构拓扑不稳定。在外力变形之后,通过将电热施加到这款布料致动器后,它会产生收缩,提供可观的收缩力。而且扭结构造的布料致动器本身非常柔顺,可拉伸,轻薄,能够输出足够的机械功用于人体助力场景。如下图所示,通过扭结构造布料,记忆合金导线通过电热变形,实现致动。

Knot-Architectured Fabric Actuators Based on Shape Memory Fibers, Advanced Functional Materials, 2022
通常记忆合金是由热驱动,用合金自身的电阻产生电热的方式加热合金,使得驱动更容易被控制。然而,记忆合金作为致动器,本质上能量效率极低,大约3%。这对于穿戴应用的场景提出了极大的挑战。极低的能量效率意味着大功耗,导致了电源小型化和工作持久性之间的得失权衡。
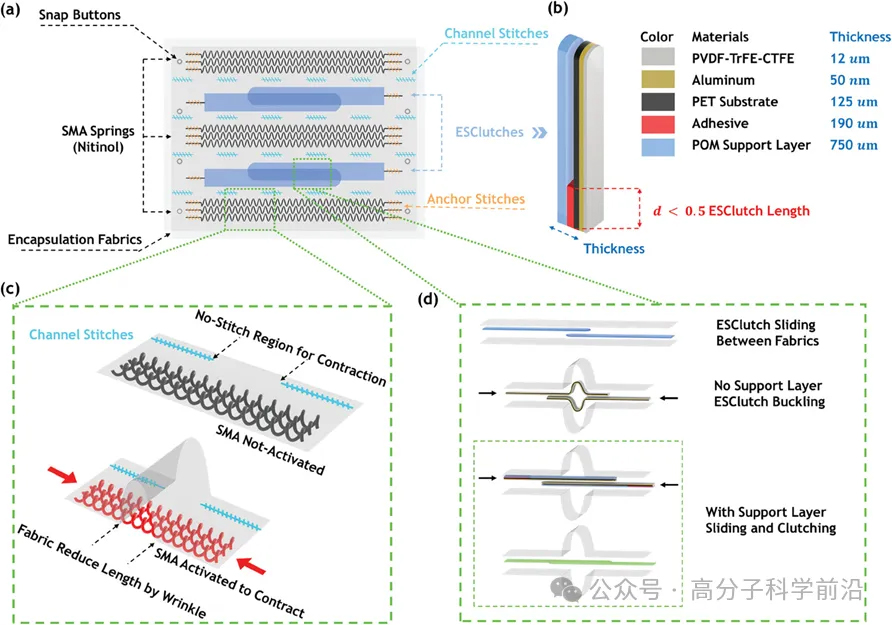
日前,针对此问题,洛桑联邦理工学院的Herbert Shea教授、博士生张华鹏通过集成软体静电离合器到基于记忆合金的布料致动器中,设计了一款新型致动器SEFA (SMA-ESClutch Fabric Actuator)。SEFA采用布料封装的架构,将记忆合金弹簧与静电离合器做成一个致动器模块。

Clutchable Fabric Actuator for Energy‐Efficient Wearable Robots, Advanced Functional Materials, 2024
如上图(a)所示,这款致动器的概念非常简单,由于离合器功耗极低(mW级别),用于锁住记忆合金产生的位移,将避免记忆合金在提供静力时的能量浪费。图(b)是封装示意图,将记忆合金与静电离合器封装在布料中,如同三明治夹层。(c)是制备的SEFA,可折叠可弯曲,一如穿在人体身上的布料。(d)和(e)是关于该致动器的应用构想:用于辅助人搬东西或者穿戴紧身的应用。
该研究的难点在于,在整个致动器收缩的过程中,静电离合器容易被弯折。如果仅替换基质材料,使得离合器变硬,将会造成另一个问题:两片离合器不能无缝贴合,导致无法有效锁住收缩位移。因此离合器软硬都不行,而该研究创造性的提出了离合器的夹层架构,既能保证其软体贴合性,又能防止在收缩的过程中被弯曲。
SEFA成功演示了用于抬东西和紧身锚的作用,并且相较于没有离合器的情况节约了70%以上的能量。


原文链接:
https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.202205732
https://onlinelibrary.wiley.com/doi/10.1002/adfm.202415099
(来源:高分子科学前沿)
※ 有关作品版权事宜请联系:010-84463638转8850 电子邮箱:info#texleader.com.cn
纺织导报官方微信



© 2026 《纺织导报》 版权所有
京ICP备10009259号-3
 京公网安备 11010502045125号
京公网安备 11010502045125号


